
Odbiorniki lokalizacyjne GNSS (Global Navigation Satellite Systems) i RTK (Real Time Kinematic) w systemie baza – rover do zastosowań naukowych
Szczegóły projektu
Projekt infrastrukturalny finansowany z programu IDUB w ramach działania I.4.2. „Fundusz odnawiania i rozwoju infrastruktury badawczej – zakup lub wytworzenie infrastruktury badawczej”
Kierownik: dr hab. Maciej Dłużewski, prof. UW, Wydział Geografii i Studiów Regionalnych UW
Kwota dofinansowania: 67 403 zł
Szczegółowy opis aparatury
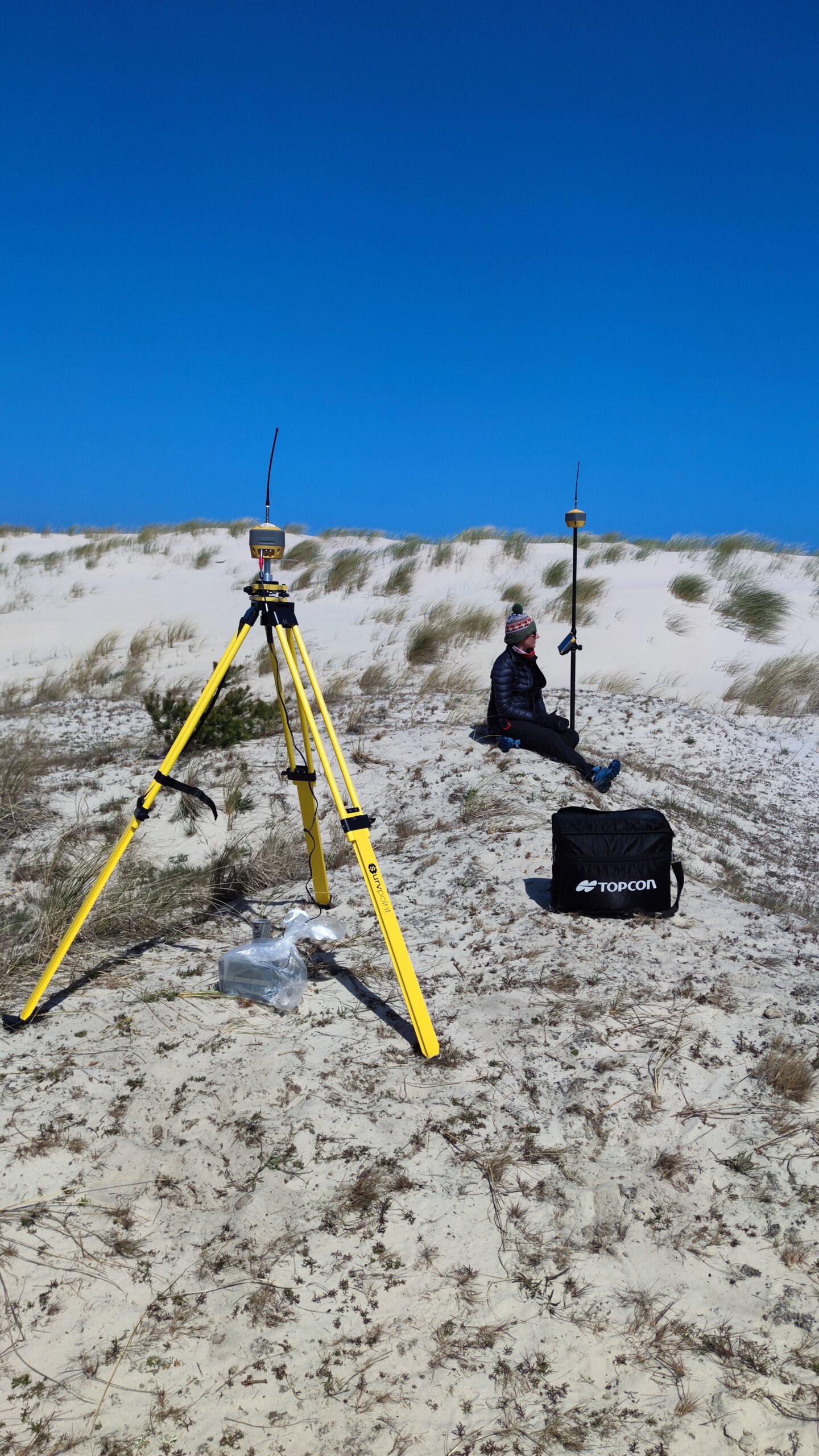
Zestaw dwóch odbiorników GNNS w systemie baza – rover z kontrolerem FC 6000, oprzyrządowaniem oraz oprogramowaniem. Umożliwia precyzyjny pomiar położenia punktu – statyczny z dokładnością H: 3 mm + 0.1 ppm, V: 3.5 mm + 0.4 ppm, dynamiczny (pomiar RTK) z dokładnością H: 5 mm + 0.5 ppm, V: 10 mm + 0.8 ppm
Potencjalne zastosowania w badaniach
Odbiorniki GNSS-RTK są szeroko wykorzystywane przez naukowców w wielu realizowanych na Uniwersytecie Warszawskim projektach wymagających lokalizacji i/lub mapowania zasobów naturalnych, co dostarcza informacji potrzebnych w zarządzaniu środowiskiem przyrodniczym. Są one niezbędne do bezpośrednich pomiarów, a także umożliwiają lokalizację z dużą dokładnością (rzędu 1–2 cm w pionie i w poziomie) punktów kontrolnych (GCP) podczas badań prowadzonych przez bezzałogowe statki powietrzne (UAV). Zastosowanie odbiorników GNSS-RTK jest najprostszym sposobem na uzyskanie wysoce precyzyjnych danych do bazy danych przestrzennych. Można je w łatwy sposób skonfigurować w zależności od wymagań użytkownika. Ponadto konfiguracja sprzętu w systemie baza – rover umożliwia wykonywanie pomiarów w obszarach pozbawionych dostępu do tradycyjnej sieci korekcji położenia (najczęściej przekazywanych przez sieć GSM).
Możliwość skorzystania ze sprzętu
Osoba kontaktowa: dr hab. Maciej Dłużewski, prof. UW, dluzewski@uw.edu.pl