
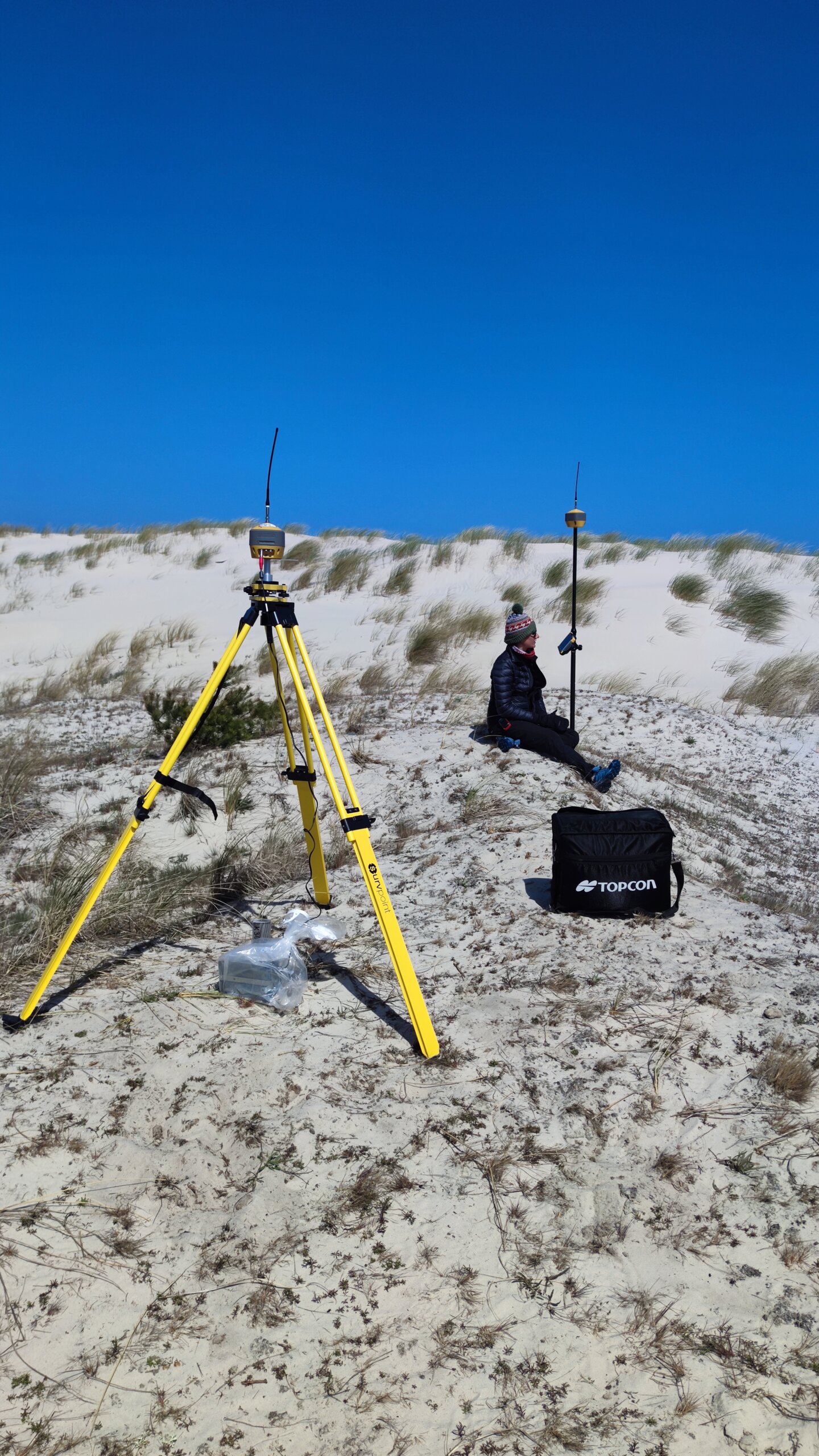
Scientific-grade Global Navigational Satellite System (GNSS) and Real-time kinematic (RTK) positioning receivers (Base-Rover System)
Project details
Project funded under the “Excellence Initiative – Research University” Programme, within the framework of I.4.2. Action “Fund for the Renovation and Development of Research Infrastructure – purchase or production of research infrastructure”
Project leader: Maciej Dłużewski, Ph.D., UW Professor, the UW Faculty of Geography and Regional Studies
The amount of funding: 67 403 zlotys
Detailed decription of the equipment
Set of two GNNS base-rover receivers with FC 6000 controller, hardware and software. Allows precise measurement of point position – static with accuracy H: 3 mm + 0.1 ppm, V: 3.5 mm + 0.4 ppm, dynamic (RTK measurement) with accuracy H: 5 mm + 0.5 ppm, V: 10 mm + 0.8 ppm
Possible applications in research
GNSS-RTK receivers are widely used by researchers in many projects carried out at the University of Warsaw that need to locate and/or map natural resources, thus contributing to environmental management. They are necessary not only for direct measurements, but also as a device for high accuracy (vertical and horizontal accuracy of 1–2 cm) positioning of benchmarks (GCPs) during UAV surveys. The use of GNSS-RTK receivers is the easiest way to get high precision data into a GIS database and can be easily configured for a variety of user requirements. In addition, the base rover configuration of the equipment makes it possible to carry out measurements in areas without access to a traditional positioning correction network (usually transmitted via GSM).
Access to the equipment
Contact person: Maciej Dłużewski, Ph.D., UW Professor, dluzewski@uw.edu.pl